![]()
 UHF-PID クアッド PID/PLL コントローラ
UHF-PID クアッド PID/PLL コントローラ
PIDオプションは4つの設定可能なPID(比例、積分、微分)コントローラを有します。
様々な計測データを基に、多くの機器パラメータと出力値に迅速なフィードバックを行います。
ロックインアンプとのシームレスな統合により、プログラマブルPIDは2つのレーザの位相同期用のPLL(フェーズロックループ)の設定や、CEOの安定化、高速AFMモードのような幅広いアプリケーションでの動作を可能にします。
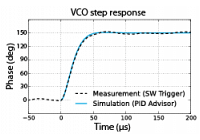
PIDアドバイザは適切なパラメータを素早く見つける手引きとなり、ステップ応答と転送機能を表示して、セットアップの深い理解をサポートします。自動調整機能により、ループフィルタ設定は自動的に調節され最小の残差PID誤差を示す点を見出だします。
主な特長
- 4つの独立PIDコントローラ
- マルチプルDUTモデル、転送機能、ステップ機能モデリングを持つPIDアドバイザによる、調整可能なターゲット帯域幅の達成
- 様々なパラメータと帯域幅の調節による、自動調性PIDが行う平均PID誤差の自動的な最小化
- 最大300 kHzまでのループフィルタ帯域幅での高速作動
- 入力パラメータ:復調データ、AUX入力、AUX出力および演算ユニット
- 出力パラメータ:出力アンプ、発振器周波数、復調器位相、AUX出力、信号出力オフセット
- 復調器Θデータ(± 64 π)の位相接続、例:光学フェーズロックループ用
- 微分分岐用ローパスフィルタ
アップグレードと互換性
- オプション追加購入可能
- その他の全UHFオプションとの互換性
アプリケーション
- レーザ周波数の安定化
- 光学フェーズロックループ、例:キャリアエンベロープオフセット安定化(CEO)
- 高速AFM、例:自動ゲインコントロール(AGC)
- MEMS計測、例:ジャイロスコープ
- 干渉計の安定化
- ナノ機構発振器
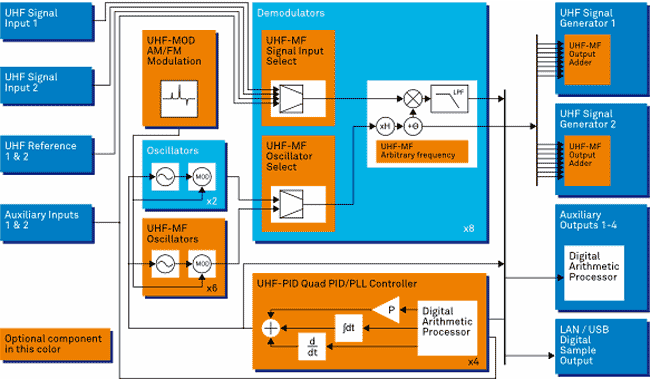
機能系統図
フェーズロックループ
PIDコントローラの重要なアプリケーションの1つは、位相同期した2つの発振器の同期 - フェーズロックループ(PLL)です。最も単純な状況は、信号が外部周波数参照用にロックインアンプに供給された場合はいつでも、復調器4または8がExtRefに設定されることによって、それが自動的に内部発振器の1つに割り当てられる場合です。1つのPIDが復調器の1つから入力として位相情報を受け取り、内部発振器の1つに周波数として供給します。この原理はまた逆の場合にも適合できますし、内部発振器の優れたフェーズノイズ特性は例えばレーザシステムのような外部セットアップに転送できることを知っておくことは非常に重要です。
演算ユニット
演算ユニットはPIDコントローラと併用して、例えば復調データへの基本的な数値演算を行って、その結果をPIDへの入力として供給します。簡単な例では干渉計の安定化の場合、atan2(Y/X) に基づく位相角計算を行いフィードバックに利用します。ここでXは基本周波数、Yは規格化因子を乗じた2次高調波を表します。
PIDアドバイザと自動調整
PIDアドバイザと自動調整機能によって、熟達していないユーザーでも制御ループのセットアップを簡単かつ便利に行える1方、LabOne® ツールセットは達成可能な性能を発揮するあらゆるの方法を提供します。プロッタはPID誤差とPID出力をタイムドメインで視覚化し、データのヒストグラムを示します。SWトリガはPIDセットポイントが変更された場合にステップ応答を記録するのに使います。これらステップ応答は直接PIDアドバイザのモデル機能と比較できます。統合されたスペクトラムアナライザは制御ループ信号の周波数ドメインデータを表示して「サーボ・バム」と潜在的ノイズ源を視覚化し、スイーパは伝達関数を明示してユーザーに全セットアップの完全な理解を与えます。
仕様
| 設定 | 4つのPIDコントローラ、PLL機能付き |
|---|---|
| PID入力パラメータ | 復調器1から8、AUX入力1および2、AUX出力1から4からのX、Y、R、Theta |
| PID出力パラメータ | 信号出力1および2の振幅、発振器1から8の周波数、AUX出力1から4、デジタル出力DIO(16ビット) |
| PID帯域幅 | 最大300 kHz |
| PID最小伝播遅延 | 1.5 µs(信号入力からAUX出力まで) |
| PLL周波数範囲 | 10 Hz ~ 600 MHz |
| PLL帯域幅 | 最大300 kHz |