![]()
MEMSコリオリ振動 ジャイロスコープの制御
前書き
このアプリケーションノートでは、MEMS コリオリ振動ジャイロスコープ(CVG)のさまざまな制御メカニズムの概要と、市販のHF2LI ロックインアンプを使用した実装方法について説明します。
MEMS ジャイロスコープは、方位角または回転角速度を測定できる微細加工された慣性デバイスです。
原理は、質量が慣性空間に対して回転する時にコリオリの力を感知できるように吊り下げられた振動構造に依存しています。
これらのコリオリの力は、ロックインアンプによって効率的に検出できます。
さらに、振動特性を最適化し、全体的なパフォーマンスを向上させるためには、通常、フィードバック制御が採用されます。
精度の高いセンシングを実現するために、制御インフラストラクチャは複雑になり、多数の制御ループが並行して実行されます。
このドキュメントでは、オープンループおよびクローズループ制御の例の実用的な実装が示されています。位相ロックループ(PLL)および自動ゲイン制御(AGC)を使用して、基本的なジャイロスコープのドライブモード制御を実行する方法について説明します。
次に、ドライブモード制御は、オープンループセンシングまたはクローズループの強制再バランス操作のいずれかと組み合わされます。さらに、電気機械的振幅変調について説明します。
この方式では、対象のすべての信号が振幅変調されます。
これにより、寄生効果を排除することでジャイロスコープのパフォーマンスを向上させることができます。
HF2LI はさまざまな機能を提供するため、振動ジャイロスコープ、加速度計、およびその他の MEMS 振動構造を駆動および特性評価するための強力な機器になります。
主な特長は、いくつかの周波数での信号変調および復調、PLL、振幅制御、PID コントローラーを内蔵していることです。
さらに、2つの 50 MHz 低ノイズ信号入力および出力ペアにより、ドライブとセンスの両方のジャイロスコープ振動モードを完全に制御できます(図1. を参照)。
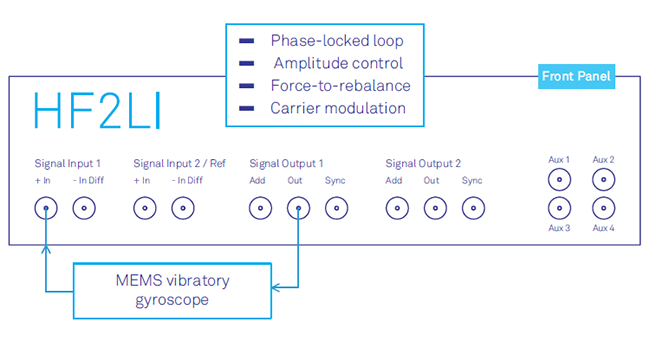 図1. Zurich Instruments HF2LI ロックインアンプには、基本的な共振器制御と高度なジャイロスコープ操作を実行するためのインフラストラクチャが組み込まれています。
図1. Zurich Instruments HF2LI ロックインアンプには、基本的な共振器制御と高度なジャイロスコープ操作を実行するためのインフラストラクチャが組み込まれています。

理論的背景
ジャイロスコープは、慣性の基準フレームに対する方位角または回転角速度を測定するための慣性デバイスです。最も一般的な MEMS ジャイロスコープは、質量ばねダンパ調和振動子である CVG です。
これは通常、X 軸と Y 軸の両方に沿った制約のない動きを可能にする2自由度の振動構造(プルーフマス)で構成されます。
取り付けプラットフォームと振動構造間の相対的な向きを測定して、適用された回転に関する情報を含むコリオリ加速度を抽出します。
ジャイロスコープは、GPS ナビゲーションシステム、スマートフォン、ヘルスモニタリングシステムなど、防衛、航空、自動車、消費者市場など、幅広い回転センシングアプリケーションで利用できるように設計されています。
それらは、測定タイプ(Shkel 2006)に応じて分類できます:(i)角回転速度測定(レートジャイロスコープ)、または(ii)回転角測定(レート積分または全角ジャイロスコープ)。
市販のMEMS ジャイロスコープのほとんどは角速度測定センサーであり、共振器の安定性とセンサーの機械構造と複雑な制御アルゴリズムに対する厳しい要求のため、直接角度測定用に装備できる MEMS ジャイロスコープはわずかです(Prikhodko 2011、Gregory 2012、Woo 2014、Trusov 2014) 。
Draper Lab(Bernstein 1993)での静電駆動音叉ジャイロスコープの最初のデモンストレーション以来、さまざまな設計が調査され、公開文献で公開されています(Yazdi 1998、Xie 2003)。
しかしながら、ロバートボッシュ GmbH と後にアナログデバイス社によって商業化された音叉デザインが、自動車業界の主要なジャイロスコープアーキテクチャです。
これまでも、ADI は、モノリシック統合 MEMS ジャイロスコープの先駆者であり続けています(Greiff 1991, Prikhodko 2014)。
そこでは、ジャイロスコープの機械要素は、1つの製造プロセスで回路と統合されています。
CVGの動作理論
CVG の動作原理は、図2 に示すように、簡略化された集中要素モデルで説明できます。
このモデルは、弾性バネによってフレームに取り付けられたプルーフマスに基づいており、X-Y 平面上で制約なしに振動することができます。
振動の2つの可能な直交モードは、通常、ドライブモードとセンスモードと呼ばれます。
モードは、コリオリの力のダイナミクスによって結合されます。
ジャイロスコープのダイナミクスの詳細な分析は(Lynch 1998)で報告されていますが、ここでは、制御モードを説明するために主な結果を簡単に説明します。
CVG は、2つの自由度(ドライブモードとセンスモード)を持つ調和振動子としてモデル化できます。
回転する基準座標系(非慣性座標系)の振動質量の運動に対する微分方程式の簡略化されたセットは、次の式で与えられます。
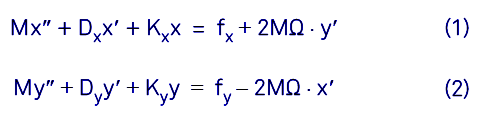
ここで、x と y はドライブモードとセンスモードの動きの変位、Dx と Dy はドライブモードとセンスモードの減衰係数、Kx と Ky は、ドライブモードとセンスモードの剛性に依存するバネ定数であり、fx および fy は、それぞれジャイロスコープのドライブモードとセンスモードに加えられる力です。
M はジャイロスコープのプルーフマスの質量、Ωは z 軸周りの入力回転速度です。
2MΩ・y' および 2MΩ・x' の項は、2つの振動モードを結合するコリオリ力を表します。
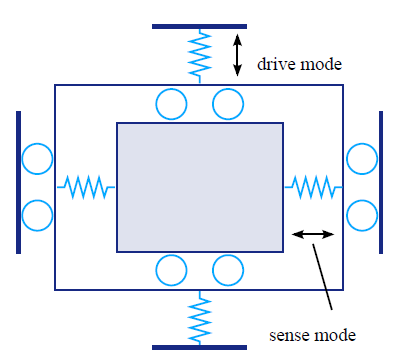
図2. CVG の2次元モデル。プルーフマスMは、x および y 方向(ドライブモードとセンスモード方向)に自由に振動できます。
z 軸を中心に回転すると、x 方向の振動はコリオリの力により y 方向の振動につながります。
通常、fx = fxs sin (ωxt) の式で与えられる駆動力 fx は、共振点 ωx =√ (Kx / M) で振動を励起および維持するために使用されます。
fxs は、加えられた力の大きさです。
振幅制御と位相ロックループの両方を使用することにより、一定の振幅 x = cx0cos (ωxt) に維持することができます。
これらの式を式 (2) に代入すると、

が得られ、回転時にコリオリ力が同じ周波数でセンスモード(y 軸)の振幅変調振動を引き起こすことがわかります。センスモードは、オープンループまたはクローズループで動作できます。
オープンループでは、力 fy はゼロ(fy = 0)であり、解は、

ここで、ty は(ωx = ωy の理想的な場合)、

で与えられる振幅減衰時定数です。
ここで、Qy と ωy は、センスモードの Q-Factor と共振周波数です。
言い換えれば、センスモード変位yは、適用された角速度Ωの直接的な尺度です。
より具体的には、y 軸に沿った振動の振幅は、周波数ωx で振幅を測定するロックインアンプ法により測定できます。
MEMS ジャイロスコープの帯域幅とダイナミックレンジを増加させるために、センスモードのクローズループ制御がよく採用されます。
いわゆる再平衡化(クローズループ)モードでは、フィードバックモードの力が生成され、センスモードの動きが抑制されます。
この場合、 fy= fys sin(ωxt) で与えられる力 fy は、y をゼロに維持するために使用されます。
加えられる力 fy の大きさ fys は、入力角速度Ωの直接的な尺度です。
直交項(周波数の不一致 Δω= ωx – ωy とプルーフマスのずれから生じる)を補正するために、加えられた力 fy は、

の形式である必要があり、正弦項の掛かった fys により Coriolis 信号をゼロにし、余弦項の掛かった fyc によって直交信号をゼロにします。
このドキュメントでは、(Lynch 1998, Leland 2005)で使用されているように、ゆっくりと変化するコンポーネント cx、sx、cy、sy のコンパクトな表記を使用します。
次の形式で座標変換を実行することで定義できます。
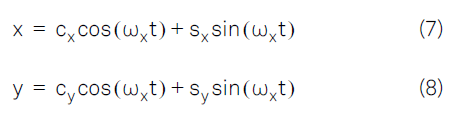
変数 cx および sx は、ドライブモード運動xの復調されたコンポーネントを表します。
同様に、cy と sy は、センスモードの動き y の復調されたコンポーネントを表します。
これらのコンポーネントの物理的な意味は次のとおりです。
cx はドライブモードの振幅、sx はドライブモードの位相、cy はコリオリの振幅(回転速度に比例)、sy は直交誤差を表します。
HF2LI ロックインアンプの概要 HF2LI デジタルロックインアンプがジャイロスコープアプリケーションにどのように使用されるかを理解するために、機器の内部構造を説明します。
HF2LI ロックインアンプの概要
HF2LI デジタルロックインアンプがジャイロスコープアプリケーションにどのように使用されるかを理解するために、機器の内部構造を説明します。
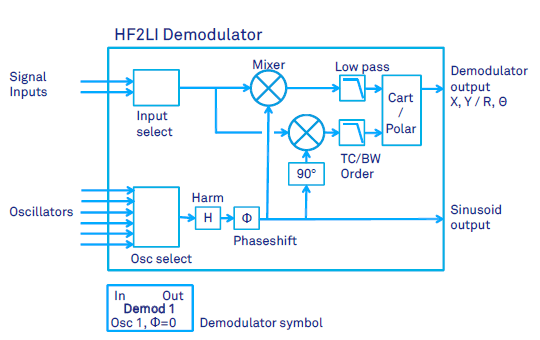 図3. 表1.に要約されている、さまざまな設定の HF2LI 復調器の回路図。下部の簡略化された記号は、このドキュメントの回路図で使用されています。
図3. 表1.に要約されている、さまざまな設定の HF2LI 復調器の回路図。下部の簡略化された記号は、このドキュメントの回路図で使用されています。
すべてのロックインアンプの最も重要なコンポーネントは、特定の周波数を中心に対象信号に非常に狭帯域のフィルターリングを実行する復調器です。
復調の結果は、信号がノイズで覆われているように見える場合でも、信号の振幅と位相を正確に測定します。HF2LI 復調器の基本的な構造を図3に示します。
復調器は、信号入力セレクタ、発振器入力セレクタ、2つのミキサ、2つのローパスフィルター、デカルトから極へのコンバータで構成されます。
選択された入力信号は、定義された周波数ωで動作する6つの入力オシレータの1つから来る正規化されたサインで乗算されます。
サインはωの高調波である場合があり、ミキサに適用される前に位相シフトされる場合があります。
互いに 90 °位相シフトした2つのミキサを使用して、入力信号の同相成分と異相成分を決定します。
これにより、周波数ωでの入力信号の振幅と位相を計算できます。図に示すように、変調器の出力は高調波と位相シフトの設定の影響を受け、セットアップへの励起信号として使用できます。
HF2LI 復調器の設定を表1にまとめます。
表1. 復調器パラメータ
| 信号 / パラメーター | 説 明 |
|---|---|
| Input select | 各復調器は、2つの信号入力のいずれかに接続できます。 |
| Osc select | 各復調器は、6つの発振器のいずれかに接続できます。 |
| Harm | 高調波、通常は「1」。 高調波を復調するための周波数乗算。 |
| Phase shift | 発振器と入出力ミキサー間の位相シフト |
| TC, BW | ローパスフィルターの時定数または帯域幅 |
| Order | 1 から8までのフィルター次数 |
| Demodulator | 測定信号の X、Y、R、Θ 信号 |
| Output | |
| Sinusoid output | 2つの信号出力のいずれかに接続できる正弦波信号 |
図4 に示すように、HF2LI は8つのデュアルフェーズ復調器で構成され、そのうち2つは PLL 動作に使用され、6つはユーザーが柔軟に構成できます。
入出力ミキサを使用すると、基本的に復調器の入力または出力をデバイスの2つの物理的な入力および出力のいずれかに接続できます。
出力マルチプレクサは、さまざまな復調器からの信号を増幅して加算できます。
これにより、2つ以上の変調器出力からの信号をデジタルで結合できます。
さらに、HF2LI には変調オプション(HF2LI-MOD)があり、振幅または周波数の変調と復調を実行できます。変調オプションを使用すると、図3 の復調器を駆動する発振器は、復調器が振幅復調を実行するように変更できます。
図5に示すように、復調器2と3に適用される発振器信号は、2つの周波数の和と差になります。
結果として、振幅変調信号の直接側波帯復調を実行することが可能です。
たとえば、f1 = 52 kHz の搬送周波数と f2 = f3 = 2 kHz の振幅変調周波数を持つ信号は、52 + 2 kHz および 52-2 kHz の側波帯周波数で直接復調できます。
従来、この動作を実行するには、直列の2つのロックイン増幅器が必要でした。
さらに、HF2LI では、変調と搬送周波数の一方または両方を固定するか、PLL で制御することもできます。 これにより、直接側波帯復調を実行できると同時に、PLL によって共振器をその固有の共振周波数で動作させることができます。
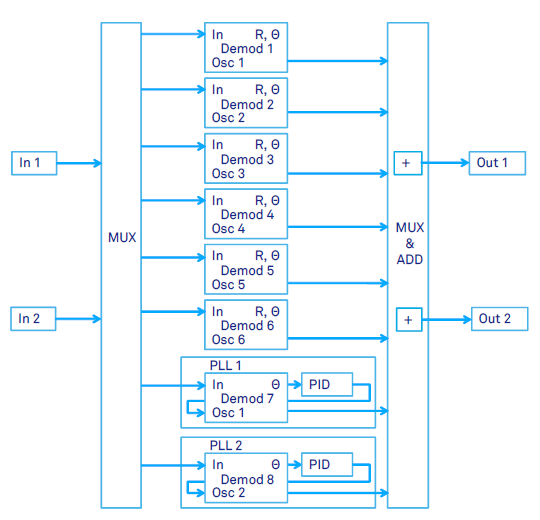 図4. 2つの信号入力、2つの信号発生器出力、6つのデュアルフェーズ復調器、2つの位相ロックループを示す HF2LI 入力および出力の回路図(図に示すように、HF2LI-PLL および HF2LI-MF オプションの両方が必要です)。
図4. 2つの信号入力、2つの信号発生器出力、6つのデュアルフェーズ復調器、2つの位相ロックループを示す HF2LI 入力および出力の回路図(図に示すように、HF2LI-PLL および HF2LI-MF オプションの両方が必要です)。
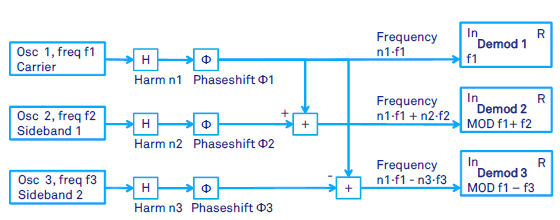 図5. 振幅変調が適用された3つの HF2LI 復調器の概略図。
図5. 振幅変調が適用された3つの HF2LI 復調器の概略図。
HF2LI の変調オプションを使用すると、ユーザーは振幅変調の搬送周波数 f1 と側波帯周波数 f2 および f3 を定義できます。結果として、復調器2は和周波数 f1 + f2 で動作し、復調器3は差周波数 f1 + f2 で動作します(高調波が使用されていない場合)。
これにより、サイドバンド f1 + f2 および f1 - f2 の信号を直接復調できます。発振器周波数 f1、f2、f3 のいずれも動的にすることができ、それにより、たとえば PLL または外部リファレンスによって制御されます。
ジャイロスコープの操作
このセクションでは、HF2LI ロックインアンプを使用した MEMS ジャイロスコープの最も重要なドライブモードとセンスモードについて説明します。
これは、読者がジャイロスコープ制御メカニズムの基本と、振動のドライブモードとセンスモードの両方の制御に HF2LI ロックインアンプを使用する方法を理解するのに役立つはずです。
ドライブモード制御
ドライブモード制御では、振動ジャイロスコープの振動は、PLL によって共振状態に維持されます。 さらに、PID コントローラーを使用して機械的振幅を一定に保ちます。
そうしないと、温度ドリフトにより CVG のパフォーマンスが低下する可能性があります。
基本的なセットアップを図6 に示します。
ジャイロスコープのドライブモードは、HF2LI の入力と出力に接続されています。
電流-電圧変換など、示されていない追加の回路が必要になる場合があることに注意することが重要です。静電駆動の場合、多くの場合、オフセット(VOffset)が駆動信号に適用されます。
このオフセットは、外部回路を使用して追加するか、HF2LI フロントパネルの追加コネクタを使用して非常に便利に追加できます。
PLL はドライブモードの共振周波数にロックします。
ドライブモードの励起には、復調器1の変調器出力が使用されます。
変調器の位相シフト⌀Xは、振動の振幅が最大になるように設定されます。
ジャイロスコープの電子回路が信号の位相に悪影響を与えない限り、位相⌀X は通常 90 度です。こ
れにより、発振器1の周波数が PLL 1 によって制御されるため、PLL ループが閉じます。
さらに、AGC ループは励起振幅を一定に保ちます。
AGC は PID コントローラーを使用して、ドライブモードの振動振幅を指定された設定値と比較および調整します。位相シフトがゼロの復調器2の復調器出力 X(式.7の cx)は、PID コントローラーへの入力として機能します。変調器の出力位相とは無関係に復調位相を設定するには、2番目の復調器が必要です
(詳細については、図3 を参照してください)。
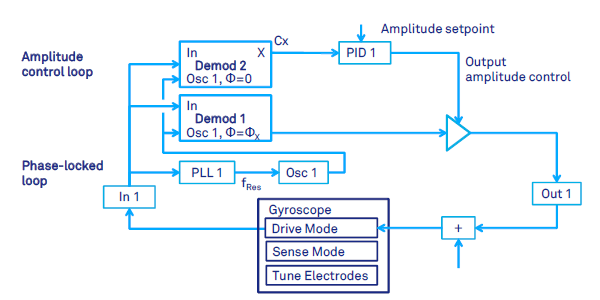 図6. 位相ロックループと自動ゲイン制御用の PID コントローラーによるジャイロスコープまたは一般的な共振器のドライブモード制御。 PLL は、共振器をその固有の共振周波数に保ちます。
図6. 位相ロックループと自動ゲイン制御用の PID コントローラーによるジャイロスコープまたは一般的な共振器のドライブモード制御。 PLL は、共振器をその固有の共振周波数に保ちます。
PID は、共振器の振幅を固定します。
センスモードのオープンループ制御
最も単純なジャイロスコープの計装では、ジャイロスコープのドライブモード制御は前のセクションで説明したように適用されますが、センスモードはオープンループで実装されます。
このスキームは基本的な動作原理の1つであり、広く使用されています。
1つの例は(Prikhodko 2012)および(Prikhodko 2013)にあります。
図7.に示すように、復調器3の入力はジャイロスコープのセンスモード出力に接続されています。
復調器3は、PLL によって制御されるオシレータ1を使用します。
復調器の位相シフト⌀Y は、復調器3の成分 Y が角速度に比例するコリオリ出力(式8.の cy)であり、復調器3の成分 X が直交誤差(式8.の sy)になるように調整されます。
位相⌀Y は通常、コンポーネント X が回転の影響を受けなくなるまで(ジャイロスコープが回転している時)試行錯誤によって設定されます。
モード一致条件(ドライブモードとセンスモードの固有周波数の差)に応じて、-90 度から 90 度まで変化する可能性があります。
入力回転に対するジャイロスコープの応答時間は、振幅減衰時定数 τy(式5.)によって制限され、ジャイロスコープの帯域幅が制限されます(Lynch 1998)。
帯域幅を増やし(応答時間を短縮)、ジャイロスコープのスケールファクターの周波数不一致Δωの影響を排除するには、フォース-リバランス制御を使用する必要があります(次のセクションを参照)。
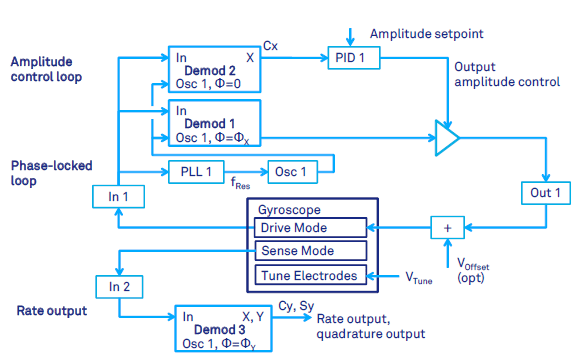 図7. クローズループドライブモードおよびオープンループセンスモード測定を備えたジャイロスコープ制御。 ドライブモードは、PLL と AGC によって制御されます。ジャイロスコープの出力は、ドライブモードの PLL と同じ周波数で動作する復調器によって測定されるセンスモードでの発振です。
図7. クローズループドライブモードおよびオープンループセンスモード測定を備えたジャイロスコープ制御。 ドライブモードは、PLL と AGC によって制御されます。ジャイロスコープの出力は、ドライブモードの PLL と同じ周波数で動作する復調器によって測定されるセンスモードでの発振です。
強制再バランス(Force-to-Rebalance) 制御
速度測定ジャイロスコープの操作のフォース-リバランス(FTR)モードの詳細は、(Lynch 1998)で説明されています。図8.は、MEMS コリオリ振動ジャイロスコープのドライブモードとセンスモードの4つの制御ループを示しています。
具体的には、ジャイロスコープからの2つの入力信号(ドライブおよびセンスモードから)が復調されて、同相および同相(異相)信号 sx、cx、sy、cyが得られます(表記は(Lynch 1998)、式7.および式8.を参照してください。
信号 sx および cx は、それぞれドライブモード振動の復調器出力の同相 X および異相 Y 成分です。式7.を参照してください。
同様に、信号cy および sy は同相 X およびセンスモード復調器の位相がずれた Y コンポーネント。
前のセクションで説明したように復調フェーズ⌀x および ⌀Y が設定されている場合、これらの信号の物理的意味は次のとおりです:cx はドライブモード振幅、sx はドライブモード位相を表し、cy はコリオリ振幅(回転に比例)、sy は直交誤差を表します。
これらの4つの信号は4つの制御ループの入力として機能し、そのうちの1つは PLL です。
PID コントローラーが使用されますが、通常、微分項 D は使用されません。
PID ループからの制御信号が加算されて1つのドライブ出力が得られ、これがセンスモード制御のためにジャイロスコープにフィードバックされます。
ドライブモード制御は、前のセクションで説明したものと同じです。
PID コントローラー2、復調器4からの変調器出力2の振幅を(90 度の位相シフトで)調整することにより、復調器3の出力 Y(式8.の cy)をゼロに維持します。
同様に、PID コントローラー3は、復調器2からの変調器出力2の振幅を調整することにより(0 度の位相シフトで)復調器3の出力X(式8.の sy )をゼロに維持します。
FTR モードは、通常、振幅減衰時定数によって制限されるオープンループセンスモードの制限を超えて、ジャイロスコープの帯域幅を拡張します。
FTR ループ帯域幅は、P および I ゲインによって制御されます。
さらに、FTR スケールファクタは、周波数の不一致に依存しないため、より安定しています(オープンループスケールファクタとは対照的)。
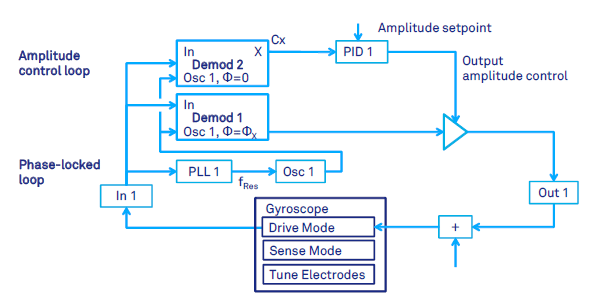 図8. クローズループドライブモードとクローズループセンスモードの両方を備えたジャイロスコープ制御。このモードは、通常、強制再バランス(FTR)と呼ばれます。FTR では、フィードバック制御により、センスモードのレートと直交出力が抑制されます。必要なフィードバック力は、角回転の速度の尺度です。
図8. クローズループドライブモードとクローズループセンスモードの両方を備えたジャイロスコープ制御。このモードは、通常、強制再バランス(FTR)と呼ばれます。FTR では、フィードバック制御により、センスモードのレートと直交出力が抑制されます。必要なフィードバック力は、角回転の速度の尺度です。
キャリア変調
ジャイロスコープのアプリケーションでは、キャリア周波数変調方式を使用することで検出感度が向上します(Trusov 2007)。
キャリア変調は、バックグラウンドノイズと寄生効果による影響を排除します。
HF2LI は、キャリア変調を含むドライブおよびセンスモードを完全に制御するための単一デバイスで十分なインフラストラクチャを備えた唯一のデジタルロックインアンプであるため、この目的に特に適した機器です。
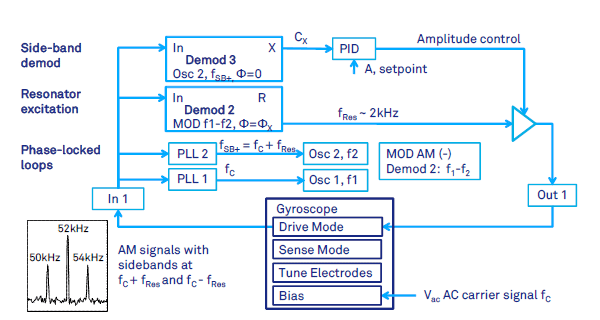 図9. キャリア変調が採用されている場合のジャイロスコープのドライブモード制御。共振周波数 fRes のジャイロスコープ信号は、搬送周波数 fc で振幅変調されます。その結果、対象の信号は周波数 fc + fRes および fc - fRes にシフトします。示されたセットアップは、(i)PLL によりサイドバンド fc + fRes にロックし、(ii) fc + fRes でサイドバンドを直接復調し、(iii)MOD により fc + fRes および fc から励起周波数 fRes を計算します (iv)ゲイン制御(AGC)を使用して fRes でジャイロスコープドライブモードを励起します。
図9. キャリア変調が採用されている場合のジャイロスコープのドライブモード制御。共振周波数 fRes のジャイロスコープ信号は、搬送周波数 fc で振幅変調されます。その結果、対象の信号は周波数 fc + fRes および fc - fRes にシフトします。示されたセットアップは、(i)PLL によりサイドバンド fc + fRes にロックし、(ii) fc + fRes でサイドバンドを直接復調し、(iii)MOD により fc + fRes および fc から励起周波数 fRes を計算します (iv)ゲイン制御(AGC)を使用して fRes でジャイロスコープドライブモードを励起します。
前述の制御ループに加えて、寄生容量フィードスルーからの分離には、周波数 fc(ジャイロスコープの共振運動よりも1桁高い)のキャリア信号が使用されます。
この場合の復調器は、図9.に示すように動作します。
この手法は、たとえば(Prikhodko 2011, Prikhodko 2012)で採用されており、電気機械振幅変調(EAM)と呼ばれます。その実装には、ドライブ方向とセンス方向の両方でのジャイロモーション信号の側波帯復調が必要です。これは、(Prikhodko 2011)で使用される4重質量ジャイロスコープ(QMG)の場合、典型的には、キャリア信号は 52 kHz に対して、2 kHz 変調周波数です。
図9. 図10. 図11. に示すように、信号発生器からの 52 kHz のキャリア信号はジャイログラウンドに供給されます。最初のロックインアンプ入力は、ジャイロスコープからのドライブモード信号のピックオフに使用され、 2番目の入力は、センスモード信号の読み出しに使用されます。
最初の出力はドライブモード制御に使用されますが、2番目の出力はセンスモードの制御用に予約されており、双方ともジャイロスコープの固有振動周波数(この場合は2 kHz 前後)の出力信号を生成します。
前のセクションで説明したように、クローズループジャイロスコープの操作では、cx(振幅)、cy(速度)、sy(直交)の3つの変数を同時に制御する必要があります。
これは、3つの PID コントローラー(PLL を除く)と、オシレータ1の周波数でフィードバック信号を生成し、相互に3つの異なる位相シフトを持つ3つの変調器によって実現されます。
ドライブモード振動の振幅は、復調器3によって測定され、PID 1 によって制御されます。
センスモード振動の速度と直交は、復調器6によって測定され、それぞれPID 2 および PID 3 によって制御されます。
復調器3および6の復調フェーズがゼロおよび⌀Y(前のセクションで説明)に設定されている場合、復調器3のコンポーネント X は振幅、復調器6のコンポーネント Y はレート、復調器6のコンポーネント X 直角位相です。
これらの3つの復調コンポーネントは PID に供給され、PID は振幅を一定レベルに維持し、レート信号をゼロに維持し、直交もゼロに維持します。
フィードバック信号を形成するために、PID 出力の出力が変調されます(つまり、発振器信号の出力振幅を制御することにより)。
ジャイロスコープのフロントエンドエレクトロニクスの位相シフトが無視できると仮定すると、90 度の位相シフトを備えた復調器2の変調器出力は、振幅とレートの両方のフィードバックに使用されます。
一方、位相シフトが 0 度の復調器5の変調器出力は、直交ヌリングに使用されます。
最終的に、制御信号をジャイロスコープにフィードバックする前に、変調された出力が合計されます。
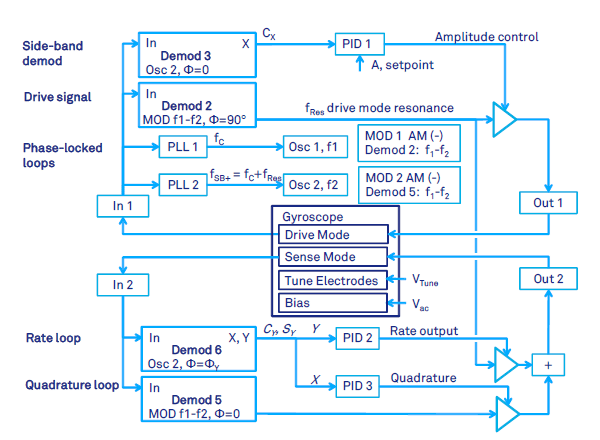 図10. キャリア変調が採用されている場合のクローズループドライブモードと強制再バランス(FTR)の両方を備えたジャイロスコープ制御。
図10. キャリア変調が採用されている場合のクローズループドライブモードと強制再バランス(FTR)の両方を備えたジャイロスコープ制御。
図10.の回路図は、加えられた力と共振時の変位との間に 90 度の位相シフトがあると想定しています。つまり、復調器2の変調器出力の位相は 90 度に設定されています。
ジャイロスコープのフロントエンドエレクトロニクスがこの位相関係に悪影響を与える場合、図11.の回路図が適用できます。 図10.で提案されている AC 直交ヌリングとは対照的に、直交ジャイロスコープ電極に DC 電圧を印加することで直交補正を実現できます。
出力2を介して動的信号をフィードバックする代わりに(図10.を参照)、PID 3 からの出力は、補助出力 Aux 1 を介して直交チューニング電極にフィードバックされます。
これにより、復調器2の変調器出力が解放され、振幅が最大になる任意の駆動位相⌀Xに設定できます。 90 度の変調位相を持つ復調器5の変調器出力は、レート信号をゼロにするために使用されます。
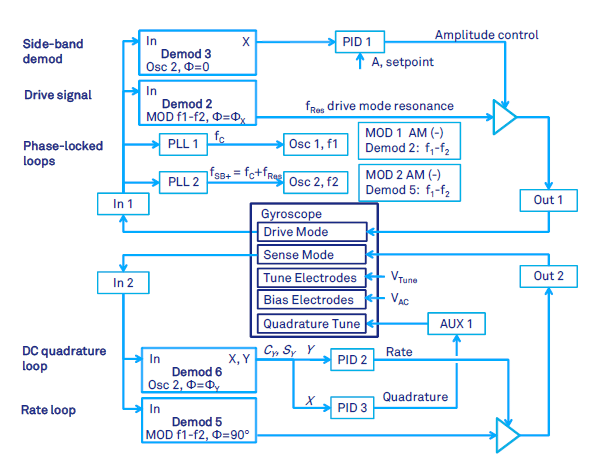 図11. 強制再バランス、キャリア変調、DC 直交調整を備えたジャイロスコープ制御。
図11. 強制再バランス、キャリア変調、DC 直交調整を備えたジャイロスコープ制御。
全角読み出し
所定の振動軸を持つ速度測定モードとは対照的に、角度測定モード(全角)では、振動パターンの自由な歳差運動が必要です。
全角読み出しは、駆動力によって引き起こされるエラーなしでジャイロスコープを操作する方法でもあります。図11.に示す全角読み出しは、(Prikhodko 2011)および(Prikhodko 2013)の結果を得るために実装されました。
(Prikhodko 2013)の第5章に示すように、ジャイロスコープのピックオフ信号の復調されたコンポーネントcx、sx、cy、sy(式7. および 式8.)は、二次不変量と歳差角の瞬時値 ϴ(t) を計算するために使用されます(1998年リンチ)。
(Prikhodko 2011)では、オープンループで全角操作が採用されました。振動を開始するために、2 kHz の動作周波数のジャイロスコープは、位相ロックループを使用して逆位相共振運動に静電駆動され、その後突然オフになりました(図12.の init スイッチで示されます)。
側波帯復調を使用した EAM 技術を使用して、ドライブモードとセンスモードの振動を検出し、歳差運動角を測定しました。
角度は、コンピューターを使用してオフラインで復調されたコンポーネントcx、sx、cy、sy から計算されます。
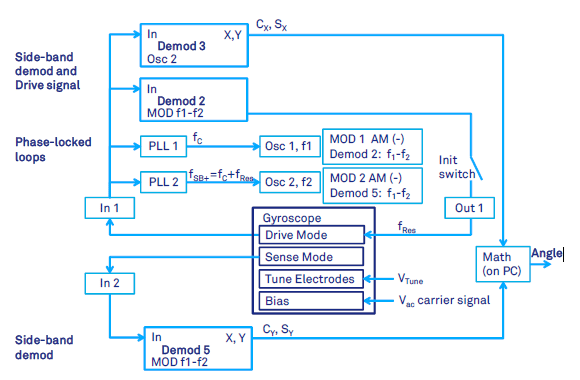 図12. オープンループ読み出しを備えた全角モードのキャリア変調を備えたジャイロスコープ。
図12. オープンループ読み出しを備えた全角モードのキャリア変調を備えたジャイロスコープ。
HF2LI ユーザーの利点
複数の制御ループを並行して実行する必要があるため、振動ジャイロスコープの制御は複雑です。 さらに、最高のパフォーマンスを実現するには、セットアップ全体で高精度で低ノイズの電子機器が必要です。
HF2LI ロックインアンプは、単一のハウジングに必要な精度と柔軟性を兼ね備えているため、ジャイロスコープの制御に特に適しています。
2つの低ノイズ入力、6つのデュアルフェーズロックインアンプ、2つの PLL、4つの汎用 PID コントローラー、および2つの信号発生器が利用可能で、必要な機能を提供するために組み合わせることができます。
単一の HF2LI デバイスには、最適なパフォーマンスを実現するために、固有の共振器周波数にロックされた PLL、強制リバランス制御、直交制御ループ、キャリア変調技術でドライブおよび振動モードを制御する機能が含まれています。
これにより、HF2LI は、直交成分と有用な同相成分(CVG のコリオリ応答を表す)を分離するという点で、最も正確な市販のロックインアンプになります。
上記の機能に加えて、HF2LI は一連のツールを提供します。
これらのツールは、本書ではこれまで言及していませんが、実験者が測定セットアップを分析し、適切なパラメーターを迅速に見つけるのに大いに役立ちます。
これらはすべて、標準のユーザーインターフェースソフトウェアで利用できます。
- ZoomFFT:共振周波数付近の周波数スペクトル。ここでは、グラウンドの問題など、システムの PLL の安定性と外乱をデバッグできます。
- PLL Advisor:PLL パラメーターを見つけるシミュレータ
- PID Advisor:PID パラメーターを見つけるシミュレータ
- オシロスコープ:生の入出力信号を表示します。
- スイーパ:共振周波数と PLL を共振に設定するために必要な位相シフトを見つけるのに役立ちます
- プロッタ:周波数および振幅信号の過渡ビューを提供します。PID パラメーターを設定し、測定中にデバイスを監視するのに役立ちます。
- Q ファクタ測定:周波数掃引または減衰時間の測定による Q 値測定(Q 値測定に関するブログを参照)
Zurich Instruments は、HF2LI の他に、UHFLI ロックインアンプも提供しています。
UHFLI は最大 600 MHz の周波数で動作でき、HF2LI と非常によく似た機能セットを備えています。
UHFLI の最小時定数は低く、PID コントローラーは高速です。
したがって、より高い制御帯域幅を必要とするアプリケーションに適しています。
HF2LI または UHFLI ロックインアンプを特定のジャイロスコープのセットアップに適用する方法の詳細とサポートについては、Zurich Instruments にお問合せください。
謝辞
このアプリケーションノートは、カリフォルニア大学アーバイン校の MicroSystems Laboratory の元メンバであり、現在アメリカマサチューセッツ州ウィルミントンにある Analog Devices、Inc. の Igor Prikhodko 氏と一緒に作成されました。
また、カリフォルニア大学アーバイン校の MicroSystems Laboratory のA. A. Trusov、A. M. Shkel、および S. A. Zotov にも、CVG とサポートに関する洞察に満ちた議論に感謝します。
参照資料
- J. Bernstein et al. 1993. "A micromachined comb-drive tuning fork rate gyroscope," Proc IEEE Micro Electro Mechanical Systems Workshop (MEMS '93), Fort Lauderdale, pp. 143-148.
- J. A. Gregory, J. Y. Cho, “Novel Mismatch Compensation Methods for Rate-Integrating Gyroscopes”, In Proc: Position, Location, and Navigation Symposium (IEEE/ION PLANS 2012), Myrtle Beach, SC, USA, 23 Apr - 26 Apr 2012, pp. 252-258.
- P. Greiff, B. Boxenhorn, T. King, L. Niles, "Silicon monol ithic micromechanical gyroscope", Solid-State Sensors and Actuators, 1991. Digest of Technical Papers, TRANSDUCERS '91, pp.966-968, 24-27 Jun 1991.
- HF2 User Manual, Zurich Instruments AG, Zurich, Switzerland, www.zhinst.com
- R. P. Leland, “Mechanical-thermal noise in MEMS gyroscopes,” Sensors Journal, IEEE, 5(3), pp. 493-500, 2005.
- D. Lynch, “Coriolis Vibratory Gyros,” in Proc. of Symposium Gyro Technology, Stuttgart, Germany, 1998, pp. 1.0–1.14. (Reproduced as Annex B, Coriolis Vibratory Gyros, pp. 56–66 of IEEE Std. 1431–2004. IEEE Standard Specification Format Guide and Test Procedure of Coriolis Vibratory Gyros, IEEE Aerospace and Electronic Systems Society, 20 December, 2004.).
- I. P. Prikhodko, S. Zotov, A. Trusov, and A. Shkel, “Foucault pendulum on a chip: Angle measuring silicon MEMS gyroscope,” in Proc. of IEEE Micro Electro Mechanical Systems Conference (MEMS 2011), Cancun, Mexico, Jan. 23–27, 2011, pp. 161–164.
- I. P. Prikhodko, A. Trusov, and A. Shkel, “North-finding with 0.004 radian precision using a silicon MEMS quadruple mass gyroscope with Q-factor of 1 million,” in Proc. of IEEE Micro Electro Mechanical Systems Conference (MEMS 2012), Paris, France, Jan. 29–Feb. 2, 2012, pp. 164–167.
- I. P. Prikhodko, “Development of a Self-Calibrated MEMS Gyrocompass for North-Finding and Tracking”, Dissertation, University of California Irvine, 2013.
- I.P. Prikhodko, J.A. Gregory, C. Merritt, J.A. Geen, J. Chang, J. Bergeron, W. Clark, M.W. Judy, “In-Run Bias Self-Calibration for Low-Cost MEMS Vibratory Gyroscopes”, In Proc: Position, Location, and Navigation Symposium (IEEE/IONPLANS 2014), Monterey, CA, USA, 5 - 8 May 2014.
- A.M. Shkel, “Type I and Type II micromachined vibratory gyroscopes”, In Proc: Position, Location, and Navigation Symposium (IEEE/ION PLANS 2006), San Diego, CA, USA, 25–27 Apr. 2006, pp. 586–593.
- A. Trusov and A. Shkel, “A novel capacitive detection scheme with inherent self-calibration,” IEEE/ASME Journal of Micro electromechanical Systems, vol. 16, no. 6, pp. 1324–1333, Dec. 2007.
- A. Trusov et al. “Force Rebalance, Whole Angle, and Self-Calibration Mechanization of Silicon MEMS Quad Mass Gyro,” IEEE International Symposium on Inertial Sensors and Systems (IEEE ISISS 2014), Laguna Beach, CA, USA, Feb. 25-26, 2014.
- J.-K. Woo, J. Y. Cho, C. Boyd, and K. Najafi, “Whole-Angle-Mode Micromachined Fused-Silica Birdbath Resonator Gyroscope (WA-BRG),” in Proc. of IEEE Micro Electro Mechanical Systems Conference (MEMS 2014), San Francisco, CA, USA, Jan. 26-30, 2014, pp. 20-23.
- H. Xie and G.K. Fedder, “Integrated MEMS Gyroscopes", Journal of Aerospace Engineering, Vol. 16 (2003), No. 2, p. 65-75.
- N. Yazdi, F. Ayazi, K. Najafi, "Micromachined inertial sensors," Proceedings of the IEEE, vol.86, no.8, pp.1640-1659, Aug 1998.