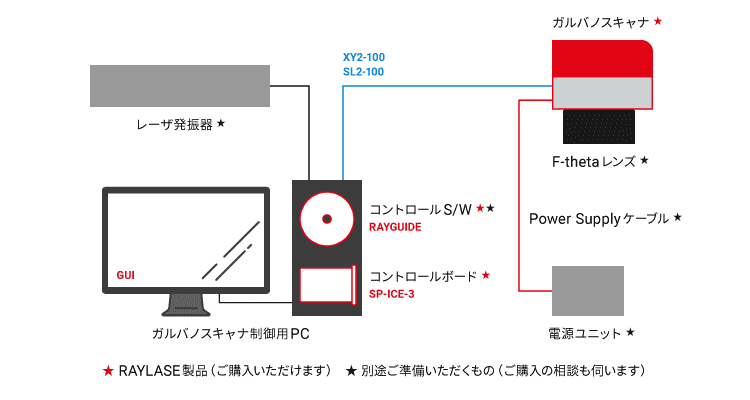
トップ 取扱メーカー 一覧 RAYLASE 技術情報一覧 システム基本構成例 システム基本構成例 下記構成図は典型的なガルバノシステム構成例にります。 青のアイコンはレイレーズよりの購入品で、赤のアイコンはお客様準備になります。 パーソナルコンピューターの外部にコントロールボードを外置きする Stand Alone モードもご利用できます。 レーザー制御信号は、Laser Modulation(トリガー)、LM_GATE(ゲート)、FPS(第1 のパルス抑制)およびアナログ / デジタルパワー信号などレーザーに合わせてコンフィグしてコントロールできます。 XY2-100(分解能 16bit)または SL2-100(分解能 20bit)はガルバノスキャナーの高速シリアル通信プロトコル(デジタル制御)でレイレーズはこれをベースにガルバノスキャナーをコントロールしています。 軸の位置決めにはアナログ版とデジタル版(デジタルエンコーダを位置検出器に搭載)があります。 デジタルタイプは XY ミラーの位置とガルバノステイタスを取得することができます。 XY2-100 ケーブルと電源ケーブルはロボット対応版があります。 外部シグナルからのマーク開始、終了をサポートしています。 コレクション(補正)ファイルはミラー、F-theta レンズを経由して発生する樽型の歪みを補正するデータファイルです。 ※ご自身でカスタム作成するソフトもご利用できます。 技術情報一覧
製品絞込フィルタ 閉じる メーカー メーカーを選択 Acktar ADOS-TECH Advanced Fiber Resources (AFR) advanced microoptic systems (aµs) Ajile Light Industries Alluxa Alpine Reaserch Optics (ARO) Altechna Analog Modules (AMI) AnMo Electronics AOI (APPLIED OPTOELECTRONICS, INC.) Arden Photonics asphericon autoVimation Axometrics BATOP BOFA International Boston Micromachines Brimrose CAM-Service CarbonVision CASTECH Cedrat technologies Chiral Photonics CODIXX Coherent Crystal IS Crystech Cutting Edge Optronics Dansk Fundamental Metrologi (DFM) DANTEC DYNAMICS DataRay Delft Circuits DIMENSION TECHNOLOGY DIOPTIC Dover Motion EARS Plant Photosynthesis Monitoring (EARS-P2M) Eitzenberger EOSPACE Evanescent Optics Exail (iXblue) Excelitas Technologies EXFO eyeme FEMTO FiberControl FIRST LIGHT FLIM LABS Fluence GiGa Concept Gigahertz Optik G&H GPD Optoelectronics HB Optical HOLO/OR ID Quantique (IDQ) ilis Infinity Photo-Optical InPhotonics Interfiber Analysis IRIDIAN Spectral Technologies IR Sources itf Technologies Koheron KrellTech L3Harris Technologies (L3Harris) Labsphere Lambda Research Optics (Lambda) LASER COMPONENTS laservision LD-PD LightSmyth Liquid Instruments Liverage Technology (Liverage) LumeDEL Lumics Lumina Power Luna Macken Instruments Marysol Technologies Medlight MESSTEC Power Converter (MPC) Micro Electronics Midel Photonics Mightex Systems Mirrorcle Technologies Modular Photonics Modulight Morgan Advanced Materials MRC Systems n2-Photonics NanoIntegris New Infrared Technologies (NIT) Newton Research Labs Northrop Grumman SYNOPTICS NPL NTT-AT NTTテクノクロス Odhner Holographics Omega Optical Ophir Optronics Solutions (Ophir) optiX fab Opto-Link Optogama Optotune Oxford Applied Research OZ Optics PCO PD-LD Phase Sensitive Innovations Phasics Phoenix Photonics Photonic Cleaning Technologies (PCT) PHOTONICS BRETAGNE Pilot Photonics Pinpoint Photonics PLS Polariton Technologies Pure Photonics QIOPTIQ Quantum Composers QubeDot Raicol Crystals Rapid Spectral Solutions (RSS) RAYLASE REO Rocky Mountain Instrument (RMI) Sanayi System Scintacor Sheaumann Laser Sill Optics SIOS Meßtechnik (SIOS) SPOT Imaging SQS Vláknová optika (SQS) Stensborg StingRay Optics SUPERLUM SWISS JEWEL C.I. TAKIRON TeraXion TIME GROUP Universal Laser Systems VACOM Vakuum Komponenten & Messtechnik Vytran Wavespectrum Laser WDI (WDI WISE DEVICE INC.) WEINERT XARION Laser Acoustics (XARION) XOS (X-Ray Optical Systems) Yamamoto Kogaku Zurich Instruments 製品タイプ 部品 / デバイス モジュール / サブシステム システム その他 用途 測定する 加工する 観察する 生成する 保護する 動かす 変調する 伝送する 制御する 駆動する 清掃する 品質管理 / 保証 調節する 評価する 減衰する 増幅する 分析する 検出する 応用分野/市場 レーザー加工 光通信 ライフサイエンス 顕微鏡 量子コンピューター 天文 / 宇宙 メディカル 農業 物理学 計測 / 分析 ディスプレイ関連 半導体関連 真空 ロボット センシング 光学実験 マシンビジョン 製品カテゴリー オプティクス 光源 光学センサー ファイバーオプティクス 光学計測器 カメラ アクチュエーター メカニクス 素材 光学システム アクセサリー エレクトロニクス ソフトウェア 顕微鏡 / 周辺機器 光変調器 工具 波長 X線 / 軟X線 紫外 可視光 赤外 テラヘルツ波 条件を選択してください すべてクリア